Software Crypto Stack for Automotive ECUs
The increasing need for cyber security in Automotive domain was discussed in our previous blog, We investigated different mechanisms by which a hacker could exploit an ECU, like compromising the

Triangulation and Map Point Creation: A Fundamental Pillar of Visual SLAM
The second part of the Visual SLAM blog series discusses one of the key components in visual SLAM: the feature extraction pipeline, which includes triangulation and map point creation. These
Getting started with RISC-V Verification using SPIKE library
RISC-V is an open-source instruction set architect (ISA) based on reduced instruction set computing principles.

Feature Extraction and Description Pipeline in Visual SLAM
This Series of blogs explores the exciting field of Feature based Visual Simultaneous Localization and Mapping (VSLAM). It also discusses the two state-of-the-art algorithms that are widely used in this

Cybersecurity for Automotive ECUs – An Introduction
One of the biggest challenges faced by OEMs today is automotive cyber security with the amount of hardware and software integrated into vehicles increasing significantly over the last few decades.
Performance Evaluation Metrics of Adaptive filter Algorithms
Performance Evaluation is important to do comparative study of different algorithms and decide which algorithm is better than others.
pybind11 — Seamless operability between C++11 and Python
In the ever-evolving landscape of programming languages, Python has established itself as a favorite among developers for its simplicity, readability, and extensive libraries. Moreover, we love Python.
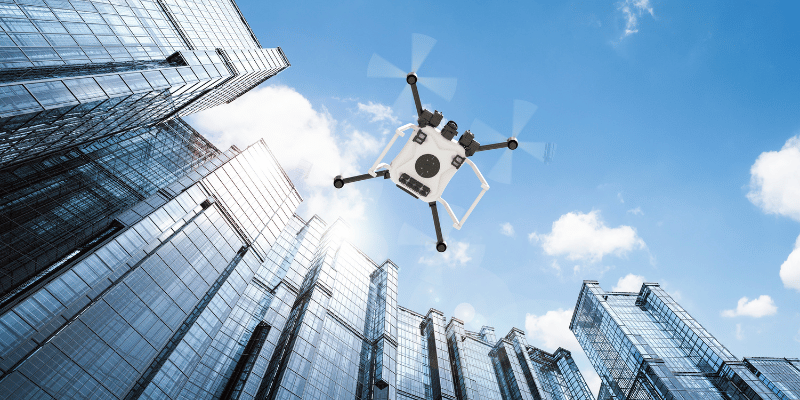
Smart Infrastructure Inspection Using Aerial Imaging
Civil infrastructure like roadways, bridges, tunnels, pipelines, transmission towers, residential and commercial buildings require continuous monitoring to ensure structural integrity.
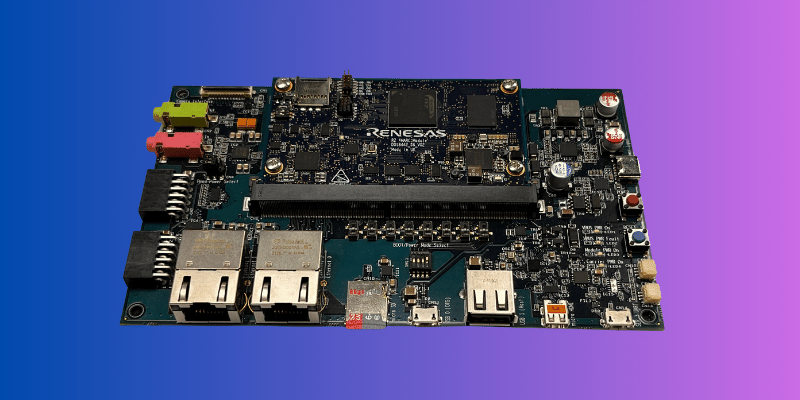
Ignitarium-Renesas Pretrained AI libraries Release-2
If you found our previous blog 'Ignitarium Releases Pre-trained AI Applications Library for Renesas RZ/V2L' interesting, we are back with the second release of pretrained AI libraries targeted for Renesas
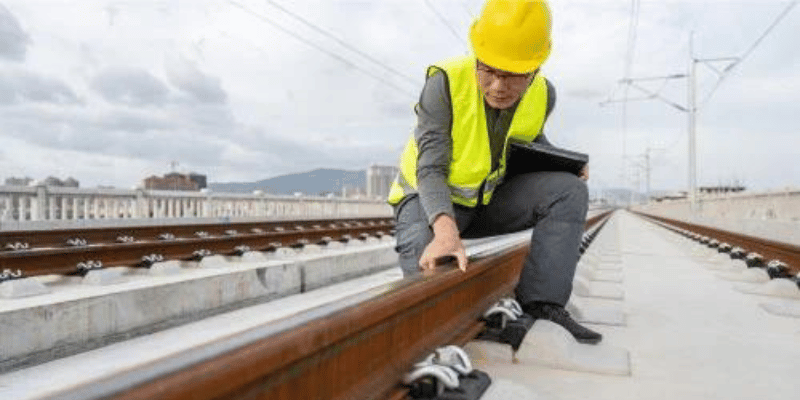
Redefining Rail Inspection with AI-Based Computer Vision
Railroads are the connective tissue of our world’s infrastructure. But despite their critical role in global transportation and supply chains, most railroad track maintenance begins with a human inspector.
Getting started with formal verification
As design complexity is increasing, the goal of 100% functional coverage becomes harder to achieve even after using constrained random stimulus and directed scenarios, therefore there is a need to

3D LiDAR SLAM – Loop Closure Explained
Robots are all equipped with simultaneous localization and mapping (SLAM) algorithms that help them build a map of its surroundings. For SLAM to produce reliable results, loop closure detection and

3D LiDAR SLAM – Localization Explained
Localization is the process of determining a mobile robot's location in relation to its surroundings. Let's imagine that the area has been mapped out and that the robot has sensors
3D LiDAR SLAM – Graph SLAM Explained
Graph-based SLAM (also known as Graph SLAM) uses a graph to represent the environment and the robot’s pose estimates. It is widely used in many robotics applications like autonomous vehicles,

3D LiDAR SLAM – Scan Matching Explained
Simultaneous Localization and Mapping (SLAM) is a popular technique in robotics that involves building a map of an unknown environment while simultaneously localizing the robot within that environment.

Perceiving the World in-’Depth’ with 3D LiDAR
Simultaneous Localization and Mapping (SLAM) is a technology used in robotics and autonomous systems to create maps of unknown environments while simultaneously tracking the location of the robot within that

Horizontal scaling of Video processing applications
Video is a common data input in the field of Computer Vision & Image processing. For example, in applications such as infrastructure maintenance and defect detection, video is captured from
A guide to a Design Engineer’s approach to Failure Mode & Effects Analysis
In the automotive industry, safety plays an immensely crucial role. All crucial systems of the automobile need to pass stringent functional safety requirements.



















